4. Use Cases
This chapter describes use cases that show how the voraus.core can be used to setup different automation solutions in conjunction with the voraus components. Through these use cases, you will gain a clear understanding of how the voraus software stack is utilized to address your needs and how easy it is to create solutions for all applications while also adjusting and optimizing your entire automation continuously during the whole operation lifetime.
4.1. Vision Based Pick and Place with a Conveyor Belt on KUKA
This tutorial will demonstrate how to create a vision based pick and place application with the voraus.operator like Fig. 82. The application uses a Sensopart V20-OB-A2-W12 camera for the vision based pose estimation that is mounted above the trace. A SCHUNK EGK 50 gripper and a Vetter conveyor belt FR-40-200-1000-10 controlled by a Beckhoff EL4004 4-channel analog output terminal are both connected via EtherCAT. The application is implemented on a KUKA robot.
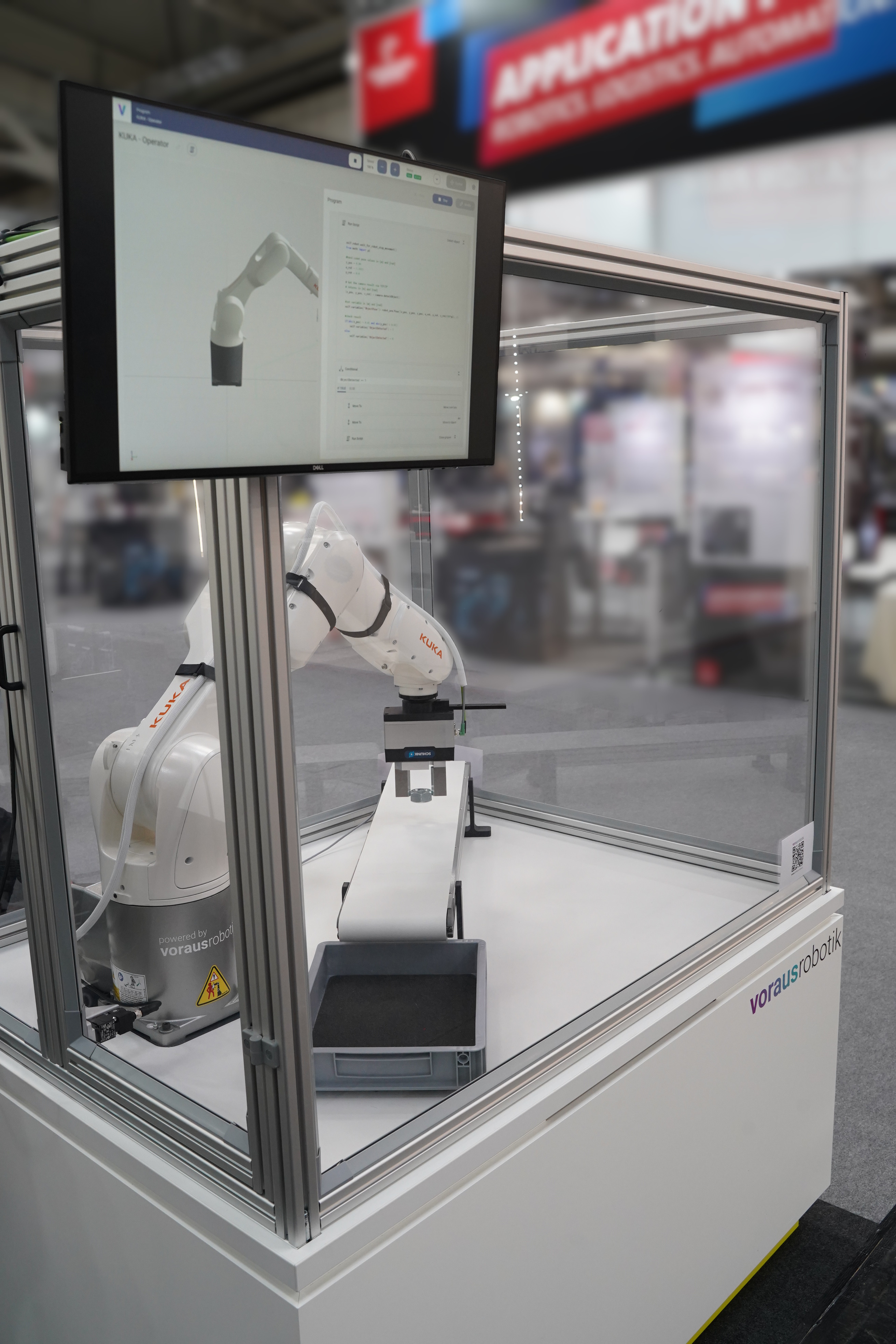
Fig. 82 Vision Based Pick and Place Application
4.1.1. Getting Started
Requirements
voraus products:
voraus.ipc (optional)
The voraus components and their purpose in this application is shown below:
graph LR
subgraph voraus.ipc
direction TB
ve["voraus EtherCAT"]
subgraph vc["voraus.core //KUKA"]
vo["voraus.operator"]
end
end
subgraph EtherCAT Fieldbus
direction LR
ao["Analog Out"]
ao --> gripper["Gripper"]
end
cam["Camera"]
vc --TCP trigger--> cam
cam --position--> vc
ve --process data--> ao
vc --control--> kuka["KUKA Robot"]
ao --voltage--> conv["Conveyor Belt"]
User --program--> vo
Setup:
Prepare the camera following the Tutorial: How to integrate a SensoPart camera with the voraus.operator.
Connect the EtherCAT devices with the following topology:
voraus.ipc ├── Beckhoff EK1100 bus coupler │ ├── Beckhoff EL1008 digital inputs (optional) │ ├── Beckhoff EL2008 digital outputs (optional) │ └── Beckhoff EL4004 analog outputs └── SCHUNK EGK 50Connect the PIN for the speed specification of the conveyor belt to analog output 1 of the EL4004 terminal.
Get the software package including the ESI file from the download section from the SCHUNK Product page. Extract and copy the ESI file to your TwinCAT installation path (default: “C:\TwinCAT\3.1\Config\Io\EtherCAT”).
4.1.2. Implementation Steps
Follow the steps from voraus EtherCAT: Digital IO Example to create an ENI File using TwinCAT and setup the voraus EtherCAT. During these steps autogenerated python code will be created from the device descriptions. For the used SCHUNK gripper the device description looks like shown in Fig. 83.
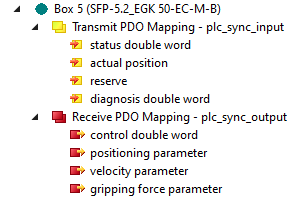
Fig. 83 SCHUNK EGK 50 Device Description
To increase the readability in the resulting code you can edit the naming. Thus, you can right-click on the Device Name or a process data obejct (PDO) name (Fig. 84/➊ + ➋) and then select “Rename” (Fig. 84/➌). To rename the PDO groups (Fig. 84/➍) you need to perform two consecutive single clicks.
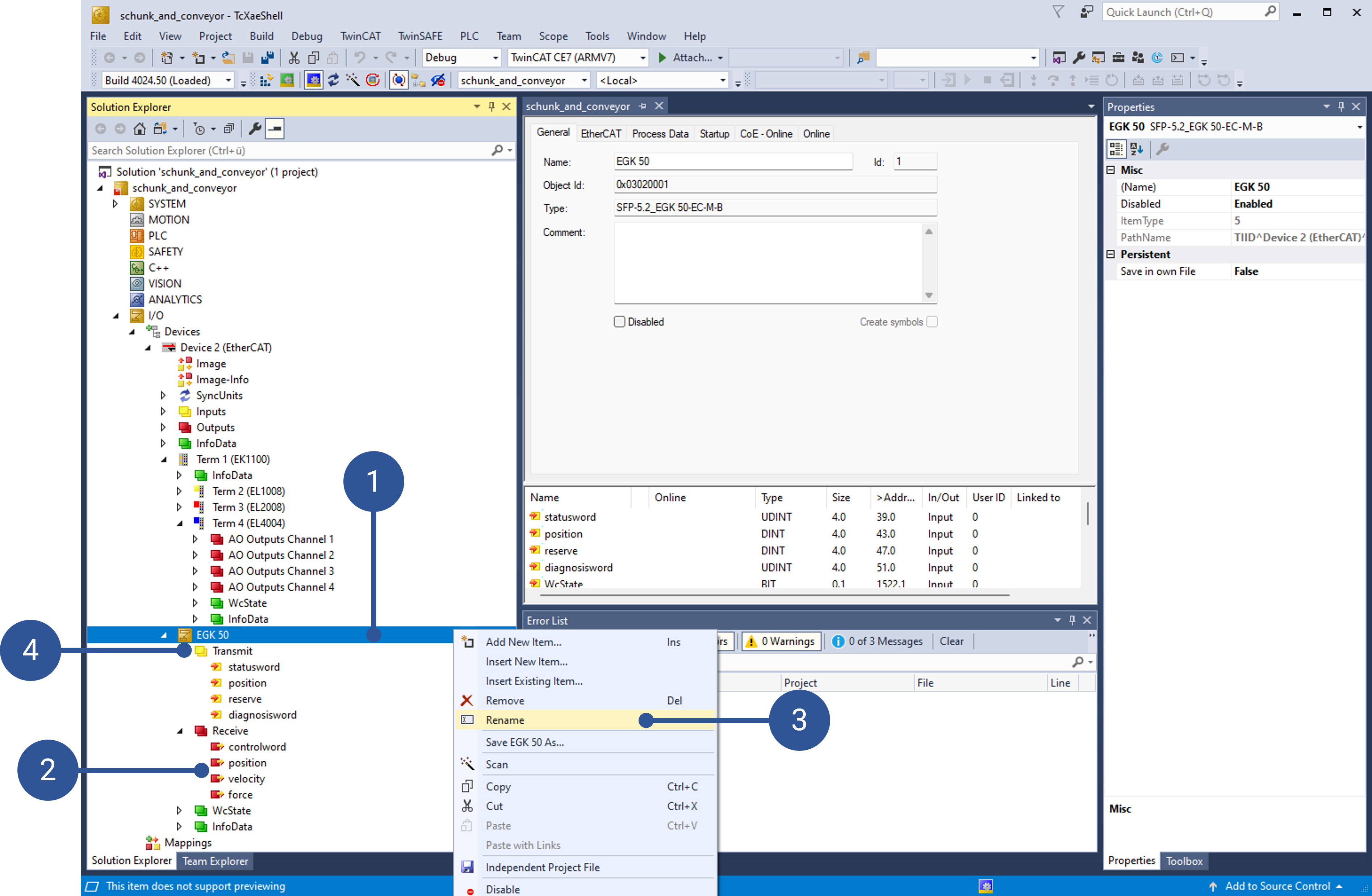
Fig. 84 Rename Device and PDOs
The resulting autogenerated code looks like this:
1"""API for Schunk EGK 50 Gripper and Conveyor."""
2
3from voraus_ecat import EtherCAT, ProcessData, pdo
4import time
5from enum import IntEnum
6
7
8class Inputs(ProcessData):
9 """Defines process inputs."""
10
11 def __init__(self) -> None:
12 """Initializes process inputs."""
13 super().__init__()
14
15 self.egk_50_transmit_statusword = pdo.Unsigned32("1:EGK 50.Transmit.statusword")
16 self.egk_50_transmit_position = pdo.Integer32("1:EGK 50.Transmit.position")
17 self.egk_50_transmit_reserve = pdo.Integer32("1:EGK 50.Transmit.reserve")
18 self.egk_50_transmit_diagnosisword = pdo.Unsigned32("1:EGK 50.Transmit.diagnosisword")
19 self.term_2_el1008_channel_1_input = pdo.Bit1("1:Term 2 (EL1008).Channel 1.Input")
20 self.term_2_el1008_channel_2_input = pdo.Bit1("1:Term 2 (EL1008).Channel 2.Input")
21 self.term_2_el1008_channel_3_input = pdo.Bit1("1:Term 2 (EL1008).Channel 3.Input")
22 self.term_2_el1008_channel_4_input = pdo.Bit1("1:Term 2 (EL1008).Channel 4.Input")
23 self.term_2_el1008_channel_5_input = pdo.Bit1("1:Term 2 (EL1008).Channel 5.Input")
24 self.term_2_el1008_channel_6_input = pdo.Bit1("1:Term 2 (EL1008).Channel 6.Input")
25 self.term_2_el1008_channel_7_input = pdo.Bit1("1:Term 2 (EL1008).Channel 7.Input")
26 self.term_2_el1008_channel_8_input = pdo.Bit1("1:Term 2 (EL1008).Channel 8.Input")
27
28
29class Outputs(ProcessData):
30 """Defines process outputs."""
31
32 def __init__(self) -> None:
33 """Initializes process outputs."""
34 super().__init__()
35
36 self.egk_50_receive_controlword = pdo.Unsigned32("1:EGK 50.Receive.controlword")
37 self.egk_50_receive_position = pdo.Integer32("1:EGK 50.Receive.position")
38 self.egk_50_receive_velocity = pdo.Integer32("1:EGK 50.Receive.velocity")
39 self.egk_50_receive_force = pdo.Integer32("1:EGK 50.Receive.force")
40 self.term_4_el4004_ao_outputs_channel_1_analog_output = pdo.Integer16("1:Term 4 (EL4004).AO Outputs Channel 1.Analog output")
41 self.term_4_el4004_ao_outputs_channel_2_analog_output = pdo.Integer16("1:Term 4 (EL4004).AO Outputs Channel 2.Analog output")
42 self.term_4_el4004_ao_outputs_channel_3_analog_output = pdo.Integer16("1:Term 4 (EL4004).AO Outputs Channel 3.Analog output")
43 self.term_4_el4004_ao_outputs_channel_4_analog_output = pdo.Integer16("1:Term 4 (EL4004).AO Outputs Channel 4.Analog output")
44 self.term_3_el2008_channel_1_output = pdo.Bit1("1:Term 3 (EL2008).Channel 1.Output")
45 self.term_3_el2008_channel_2_output = pdo.Bit1("1:Term 3 (EL2008).Channel 2.Output")
46 self.term_3_el2008_channel_3_output = pdo.Bit1("1:Term 3 (EL2008).Channel 3.Output")
47 self.term_3_el2008_channel_4_output = pdo.Bit1("1:Term 3 (EL2008).Channel 4.Output")
48 self.term_3_el2008_channel_5_output = pdo.Bit1("1:Term 3 (EL2008).Channel 5.Output")
49 self.term_3_el2008_channel_6_output = pdo.Bit1("1:Term 3 (EL2008).Channel 6.Output")
50 self.term_3_el2008_channel_7_output = pdo.Bit1("1:Term 3 (EL2008).Channel 7.Output")
51 self.term_3_el2008_channel_8_output = pdo.Bit1("1:Term 3 (EL2008).Channel 8.Output")
The Inputs and Outputs of the SCHUNK gripper are accessible with the variables in Lines 15 to 18 & 36 to 39, respectively. The variable to control the conveyor is the one in Line 40. Add this code to the voraus.operator program from Sensopart with Operator: Implementation Steps as a Run Script command. This enables other commands to use the voraus EtherCAT within the program.
Add another Run Script command for the Conveyor class, which sets the analog output to control the conveyor’s speed (Line 8):
1from enum import IntEnum
2
3class Conveyor:
4 def __init__(self, ethercat: EtherCAT):
5 self.ethercat = ethercat
6
7 def set_voltage(self, voltage: float) -> None:
8 self.ethercat.outputs.term_4_el4004_ao_outputs_channel_1_analog_output.set(round((voltage/10)*32767))
9 ethercat.write_pdos()
10
11 def stop(self) -> None:
12 self.set_voltage(0.7)
13
14 def default_velocity(self) -> None:
15 self.set_voltage(0.0)
16
17 def set_velocity(self, velocity):
18 if velocity <= 0:
19 self.stop()
20 else:
21 voltage = min((velocity * 9) + 1, 10.0)
22 self.set_voltage(voltage)
For the SCHUNK gripper add a further Run Script command:
1import time
2from enum import IntEnum
3
4
5class EGK50:
6 MIN_TORQUE = 50 # value in %
7 MAX_TORQUE = 100
8 MIN_VELOCITY = 6250
9 MAX_VELOCITY = 130000
10
11 class ControlWord(IntEnum):
12 FAST_STOP = 0
13 STOP = 1
14 ACKNOWLEDGE = 2
15 RELEASE_FOR_MANUAL_MOVEMENT = 5
16 GRIP_DIRECTION = 7
17 RELEASE_WORKPIECE = 11
18 GRIP_WORKPIECE = 12
19 MOVE_TO_ABSOLUTE_POSITION = 13
20 MOVE_TO_RELATIVE_POSITION = 14
21 ACTIVATE_GPE = 31
22
23 class StatusWord(IntEnum):
24 READY_FOR_OPERATION = 0
25 READY_FOR_SHUTDOWN = 2
26 COMMAND_SUCCESS = 4
27 COMMAND_RECEIVE_TOGGLE = 5
28 WARNING = 6
29 ERROR = 7
30 RELEASE_FOR_MANUAL_MOVEMENT = 8
31 SOFTWARE_LIMIT_REACHED = 9
32 NO_WORKPIECE = 11
33 WORKPIECE_GRIPPED = 12
34 POSITION_REACHED = 13
35 WORKPIECE_LOST = 16
36 WRONG_WORKPIECE = 17
37 GPE = 31
38
39 def __init__(self, ethercat: EtherCAT):
40 self.ethercat = ethercat
41
42 # outupts
43 self.control_word = 0
44 self.target_position = 0
45 self.velocity = 0
46 self.torque = 0
47
48 # inputs
49 self.status_word = 0
50 self.current_position = 0
51
52 self._update()
53 self.control_word = 1 << EGK50.ControlWord.FAST_STOP # fast stop is 0 active --> set to high
54 self.velocity = MIN_VELOCITY
55 self.torque = MIN_TORQUE
56 self._update()
57 self._ack_error()
58
59 def move_to_absolute_position(self, position: int, velocity: int = MAX_VELOCITY) -> None:
60 """Move the motor to a specified position with a given velocity.
61
62 Parameters:
63 position (int): Target position in µm.
64 velocity (int): Movement speed in µm/s (default is MAX_VELOCITY).
65
66 Raises:
67 ValueError: If velocity is outside the range [MIN_VELOCITY, MAX_VELOCITY].
68 RuntimeError: If a warning or error occurs during the movement.
69 """
70 self.target_position = position
71 if velocity < self.MIN_VELOCITY:
72 raise ValueError(f"Velocity must be at least {self.MIN_VELOCITY} µm/s")
73 if velocity > self.MAX_VELOCITY:
74 raise ValueError(f"Velocity mustn't be larger than {self.MAX_VELOCITY} µm/s")
75 self.velocity = velocity
76 self.torque = 0
77 self._update()
78 self.control_word |= 1 << EGK50.ControlWord.MOVE_TO_ABSOLUTE_POSITION
79 self._update()
80 try:
81 while True:
82 self._update()
83 if self.test_statusword_bit(EGK50.StatusWord.COMMAND_SUCCESS): # done
84 self._update()
85 return
86 if self.warning_or_error_present():
87 raise RuntimeError("Failed to move to absolute position!")
88 finally:
89 self.control_word &= ~(1 << EGK50.ControlWord.MOVE_TO_ABSOLUTE_POSITION)
90 self._update()
91
92 def _ack_error(self) -> None:
93 self.control_word |= 1 << EGK50.ControlWord.ACKNOWLEDGE
94 self._update()
95 self.control_word &= ~(1 << EGK50.ControlWord.ACKNOWLEDGE)
96 self._update()
97
98 def warning_or_error_present(self) -> bool:
99 """Check if there is a warning or error present.
100
101 Returns:
102 True if a warning or error is present, False otherwise.
103 """
104 return self.test_statusword_bit(EGK50.StatusWord.WARNING) or self.test_statusword_bit(EGK50.StatusWord.ERROR)
105
106 def test_statusword_bit(self, bit: StatusWord) -> bool:
107 """Test if a specific bit is set in the status word.
108
109 Parameters:
110 bit: The bit to test in the status word.
111
112 Returns:
113 True if the specified bit is set, False otherwise.
114 """
115 return self.status_word & (1 << bit) > 0
116
117 def grip_object(self, torque: int = MIN_TORQUE) -> bool:
118 """Grip an object with the specified torque.
119
120 Args:
121 torque (int): The torque value (in percentage) to apply. Default is 50.
122
123 Returns:
124 success: Whether an object was grabbed or not
125 """
126 if torque < self.MIN_TORQUE:
127 raise ValueError("Torque must be at least 50%!")
128 if torque > self.MAX_TORQUE:
129 raise ValueError("Torque can not be larger than 100%!")
130 self.velocity = 0
131 self.torque = torque
132 self._update()
133 self.control_word |= 1 << EGK50.ControlWord.GRIP_WORKPIECE
134 self._update()
135 success = False
136 try:
137 while True:
138 self._update()
139 if self.test_statusword_bit(EGK50.StatusWord.COMMAND_SUCCESS): # done
140 self._update()
141 success = True
142 break
143 if self.test_statusword_bit(EGK50.StatusWord.NO_WORKPIECE):
144 success = False
145 break
146 if self.warning_or_error_present():
147 success = False
148 break
149 finally:
150 self.control_word &= ~(1 << EGK50.ControlWord.GRIP_WORKPIECE)
151 self._update()
152 return success
153
154 def _update(self) -> None:
155 self.ethercat.outputs.egk_50_receive_controlword.set(self.control_word)
156 self.ethercat.outputs.egk_50_receive_position.set(self.target_position)
157 self.ethercat.outputs.egk_50_receive_velocity.set(self.velocity)
158 self.ethercat.outputs.egk_50_receive_force.set(self.torque)
159 self.ethercat.write_pdos()
160 time.sleep(0.1)
161 self.ethercat.read_pdos()
162
163 self.control_word = self.ethercat.outputs.egk_50_receive_controlword.get()
164 self.target_position = self.ethercat.outputs.egk_50_receive_position.get()
165 self.velocity = self.ethercat.outputs.egk_50_receive_velocity.get()
166 self.torque = self.ethercat.outputs.egk_50_receive_force.get()
167
168 self.status_word = self.ethercat.inputs.egk_50_transmit_statusword.get()
169 self.current_position = self.ethercat.inputs.egk_50_transmit_position.get()
The controlword GRIP_WORKPIECE (Line 112) used in the method grip_object() (Line 95) is meant to
close the gripper force-based, therefore, it can deal with objects of different sizes. However, the gripper is pretty
slow in this mode. That is why opening the gripper with the faster mode MOVE_TO_ABSOLUTE_POSITION (Line 68) in
method move_to_absolute_position() (Line 59) is more convenient.
Next you can create an EtherCAT Client instance (Line 1). With an established connection to the voraus EtherCAT (Line 2) you can set the master into operational state (Line 3) to cyclically update the process data. Finally you can create instances of the conveyor and the gripper class (Line 4 & 5):
1ethercat = EtherCAT(inputs=Inputs(), outputs=Outputs())
2with ethercat.connection(ETHERCAT_MASTER_OPCUA_URL):
3 ethercat.set_op_state()
4 conveyor = Conveyor(ethercat)
5 gripper = EGK50(ethercat)
Now you can add the new gripper and conveyor commands to the appropriate positions in the voraus.operator program from Sensopart with Operator: Implementation Steps. After reaching the tool position from the camera you can grip the object with:
1self.robot.wait_for_robot_stop_movement()
2
3with ethercat.connection(ETHERCAT_MASTER_OPCUA_URL):
4 gripper.grip_object()
Then you can drive to a position right over the conveyor and release the object with the following code:
1self.robot.wait_for_robot_stop_movement()
2
3with ethercat.connection(ETHERCAT_MASTER_OPCUA_URL):
4 gripper.move_to_absolute_position(60000)
and finally, start the conveyor to move the object back to the start position with:
1self.robot.wait_for_robot_stop_movement()
2
3with ethercat.connection(ETHERCAT_MASTER_OPCUA_URL):
4 conv.set_velocity(1.0)
while the robot can move back to its starting position, too. To stop the conveyor add:
1self.robot.wait_for_robot_stop_movement()
2
3with ethercat.connection(ETHERCAT_MASTER_OPCUA_URL):
4 conv.stop()
4.2. Using the External OPC UA Server
This tutorial demonstrates how to utilize the external OPC UA server in combination with a program to facilitate variable exchange between the robot and an external device (e.g., a PLC). It also covers the process of starting and stopping programs via an OPC UA communication.
Note
To follow this example the OPC UA Custom Command package is required.
Note
The variables on the external OPC UA server exist only while a program is running. Once the program execution stops, the variables are destroyed.
4.2.1. OPC UA Server Configuration
The external OPC UA server has a default configuration with five variables, which is depicted in Fig. 85. To use the server in your program, it is not required to make any changes to this configuration and you can continue with the next section of this instruction. It is, however, possible to register additional nodes or to rename existing ones, which has no impact on the variables in your program but will be visible to other clients connected to the server.
To do this mount the file voraus-gateway/config/external-opcua.json into your host system and open it
with an editor of your choice.
Locate the node Userapp/AppSpecific and find the five default nodes named info1 to info5. Change the
names according to your needs but note that the order must match the order in which the variables are initialized in
your program (see section Set up an example program). You can add the optional attributes ReadOnly (bool)
and NodeDescription (string). The node IDs can be chosen freely as long as they are unique.
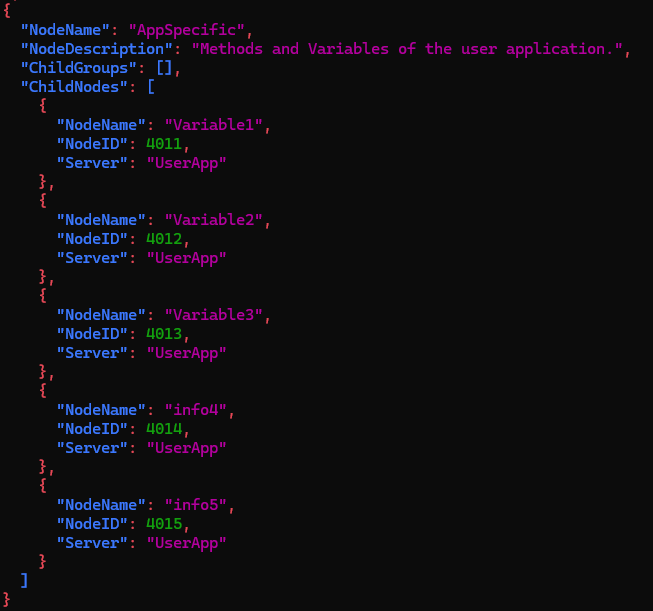
Fig. 85 Renaming the OPC UA server variables
Note
The external OPC UA server is automatically started with the system. Configuration changes will be applied with the next start of the system.
4.2.2. Set up an example program
To use the external OPC UA server, either create a new program or open an existing one.
(Optional) In the Modify mode, open the Variables editor in the top-right corner and define the variables you want to transmit, as shown in Fig. 86. The supported types are integer, float, and string. Their initial value can be disregarded - this step is only for initializing the variables within the program if they are to be used with the graphical function blocks such as conditions or loops.
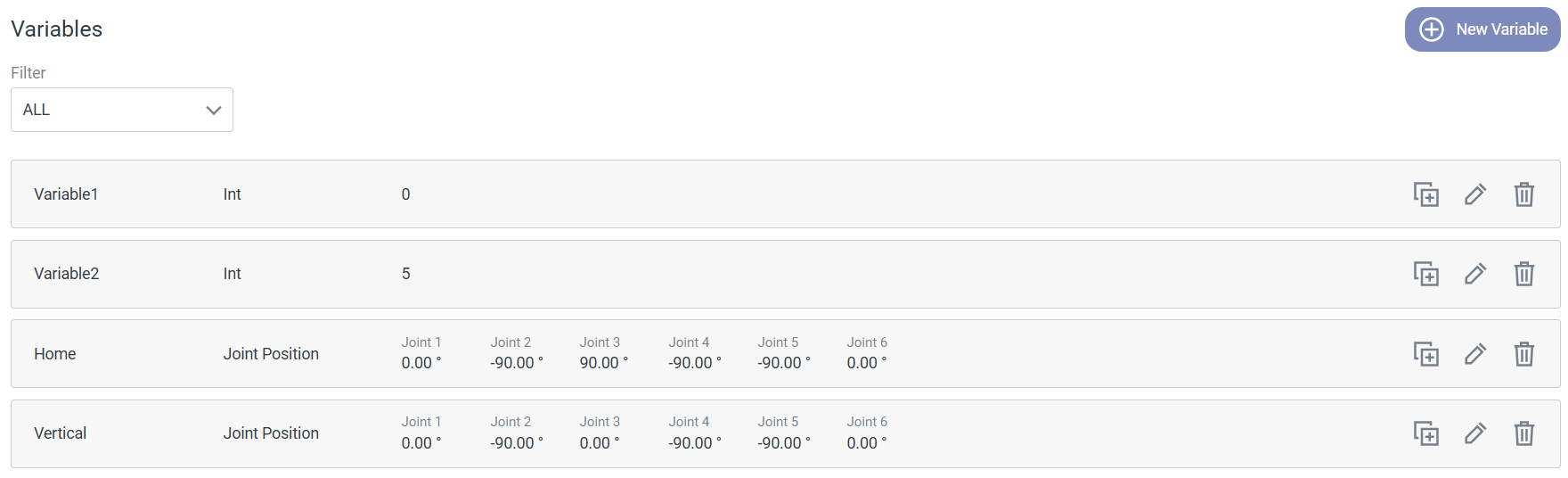
Fig. 86 Initialize program variables
To define the program variables as OPC UA variables on the server, insert an OPC UA - Set Server Variable Custom Command for each variable at the beginning of your program. Specify the name of the variable on the server. This name does not have to match the variable name from the server configuration and will not be seen from outside the program, it is only needed for retrieving the current value via the OPC UA - Read Server Variable Custom Command later on. It can match the name in your program but does not have to. Choose the correct variable type and assign its value. You can either link it to a program variable or set a specific value directly (Fig. 87). The order in which the variables are initialized determines their order on the server, regardless of their names in the configuration file.
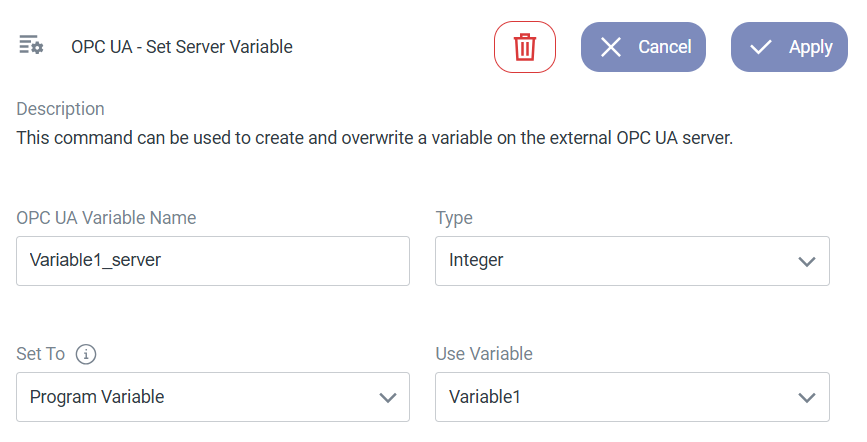
Fig. 87 OPC UA - Set Server Variable command interface
To read the current value of a variable from the server, use the OPC UA - Read Server Variable Custom Command (Fig. 88). Specify the variable’s name on the server side and the target program variable where the value will be stored.
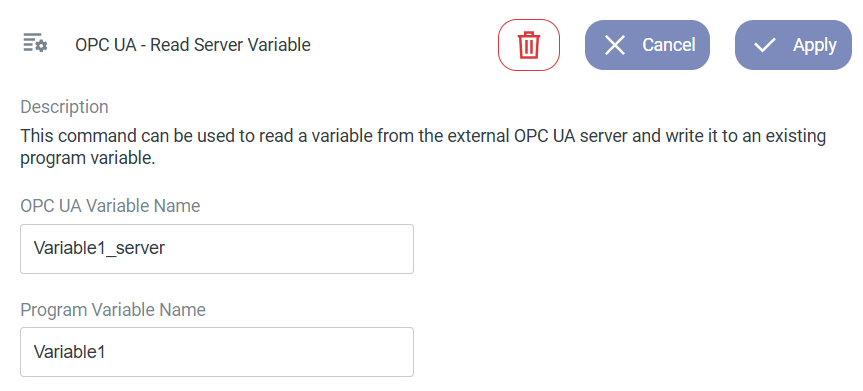
Fig. 88 OPC UA - Read Server Variable command interface
The image below (Fig. 89) illustrates an example of a program implementing cyclic OPC UA communication. At the start of the program, three variables are initialized on the server. The first two are set to the values of program variables and the third is explicitly set to 0. The main loop consists of two parts:
Reading: The value of
Variable1is read from the server and assigned to its corresponding program variable.Conditional Execution: A Conditional command determines actions based on the value of
Variable1.- If
Variable1is greater than 3: The program variable
Variable2is set to 10.The server variable
Variable2_serveris updated with the value ofVariable2.Alternatively, if the program variable is not required, the server variable (e.g.,
Variable3_server) can be directly assigned a specific value.
- If
- Else branch (not shown in the image):
Variable2_serveris set to -5.
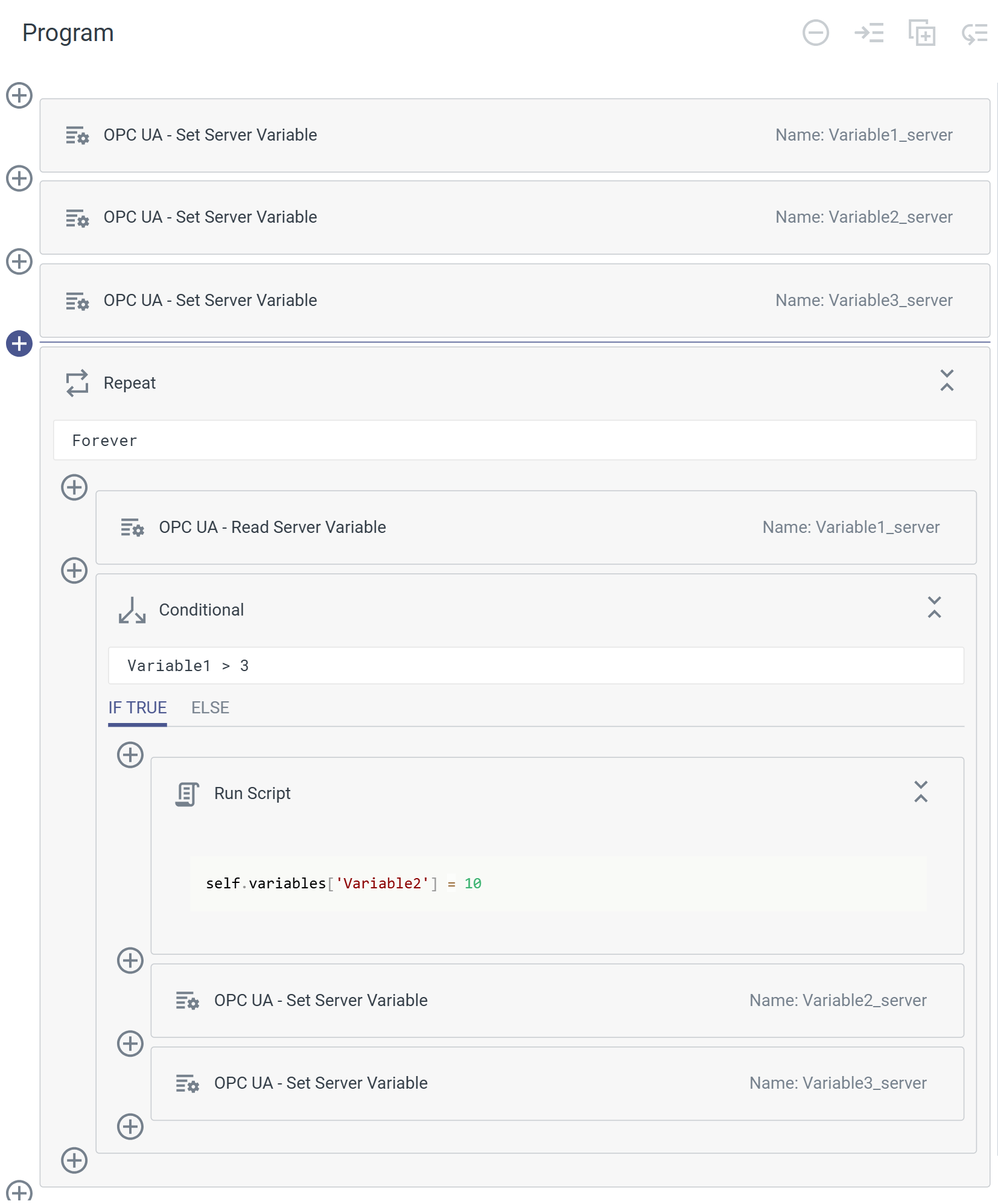
Fig. 89 Example program sequence
In case you want to write the server variables with an external client you need to activate Remote Control via the status page of the HMI.

Fig. 90 Activate Remote Control to write variables on the server
4.2.3. Manual OPC UA Client - UaExpert
The OPC UA communication can be tested with a client such as UaExpert. Establish a connection to the external OPC UA server (opc.tcp://192.168.1.1:4840) and navigate to the node Userapp/AppSpecific. While the program is running you can see the server variables (named as in the config file). Draw them into the Data Access View to monitor their values, as seen in Fig. 91. If Remote Control is active you can also set values which will be sent to the program. Under the node Userapp/Management you can find methods to start and stop a program by its name.
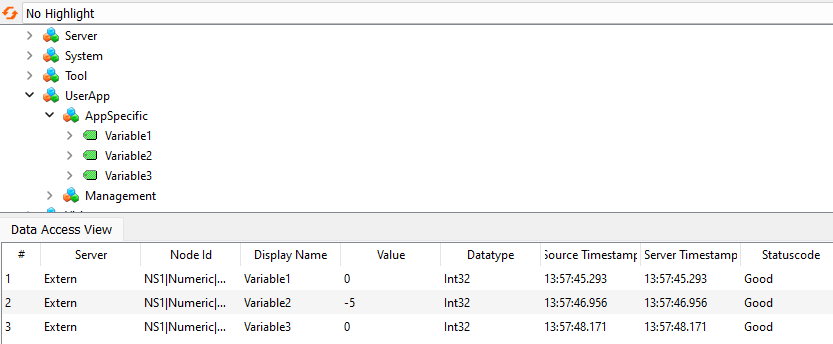
Fig. 91 Monitor the server variables in UaExpert
4.2.4. OPC UA Client in Python
The following Python code demonstrates how to create an OPC UA client that starts a program named “External OPC UA
Server” and interacts with two nodes. It registers the node IDs, which can be customized in the configuration file on
controller 2. By default, the IDs for info1 to info5 are 304011 to 304015. The code reads the value of node2
(Variable2) and sets the value of node1 (Variable1) to 5.
1"""Example script for using an OPC UA client directly in Python."""
2
3import logging
4import time
5from contextlib import contextmanager
6from typing import Generator
7
8from asyncua.sync import Client, ua # type: ignore
9
10logger = logging.getLogger(__name__)
11
12
13class OpcuaPublic:
14 """Public OPC UA client class for handling the connection and starting a program."""
15
16 def __init__(self, url: str):
17 """Initialize the OPC UA client parameters.
18
19 Args:
20 url: URL for the OPC UA client in the style of opc.tcp://<IP_ADDRESS>:<PORT>
21 """
22 self.url = url
23 self._client: Client | None = None
24
25 @property
26 def client(self) -> Client:
27 """Makes sure client is not None.
28
29 Returns:
30 The OPC UA client.
31 """
32 assert self._client is not None, "OPC UA client not connected."
33 return self._client
34
35 @contextmanager
36 def open_connection(self) -> Generator[None, None, None]:
37 """Manage the OPC UA connection.
38
39 Yields:
40 None: Allows code execution within the context block while
41 ensuring the OPC UA connection is properly opened and closed.
42 """
43 with Client(self.url) as public_client:
44 self._client = public_client
45 yield
46
47 def start_program(self, program_name: str) -> None:
48 """Starts the given program.
49
50 Args:
51 program_name: Name of the program, [syntax: program_'name of your program'.py].
52
53 Raises:
54 RuntimeError: If the program cannot be started.
55 """
56 try:
57 with self.open_connection():
58 management = self.client.get_node("ns=1;i=107")
59 start_user_app = self.client.get_node("ns=1;i=9010067")
60 management.call_method(
61 start_user_app,
62 ua.Variant(program_name, ua.VariantType.String),
63 ua.Variant(0, ua.VariantType.UInt32),
64 )
65 except ua.UaError as e:
66 msg = "Failed to start the program!"
67 raise RuntimeError(msg) from e
68
69 def stop_program(self) -> None:
70 """Stops the current program.
71
72 Raises:
73 RuntimeError: If the program cannot be stopped.
74 """
75 try:
76 with self.open_connection():
77 management = self.client.get_node("ns=1;i=107")
78 stop_user_app = self.client.get_node("ns=1;i=9010068")
79 management.call_method(stop_user_app)
80 except ua.UaError as e:
81 msg = "Failed to stop the program!"
82 raise RuntimeError(msg) from e
83
84
85if __name__ == "__main__":
86 OPCUA_CLIENT_URL = "opc.tcp://192.168.1.1:4840"
87 robot = OpcuaPublic(OPCUA_CLIENT_URL)
88
89 robot.start_program("program_external_opc_ua_server.py")
90 time.sleep(2)
91
92 with robot.open_connection():
93 try:
94 node1 = robot.client.get_node("ns=1;i=304011")
95 node2 = robot.client.get_node("ns=1; i=304012")
96 val = node2.get_value()
97 data_value = ua.DataValue(ua.Variant(5, ua.VariantType.Int32))
98 node1.set_value(data_value)
99 logger.info(f"Variable: {val}")
100 except ua.UaError as e:
101 logging.exception(f"An Exception was thrown!: {e}")
102
103 robot.stop_program()