Pick and Place Example
The target application is the palletizing of packages from a conveyor belt onto a pallet. In an introductory example, see Fig. 23, the robot is loaded as a digital twin and controlled via the Python API. The next step is to show how the 3D model of the entire system can be loaded and integrated into the simulation.
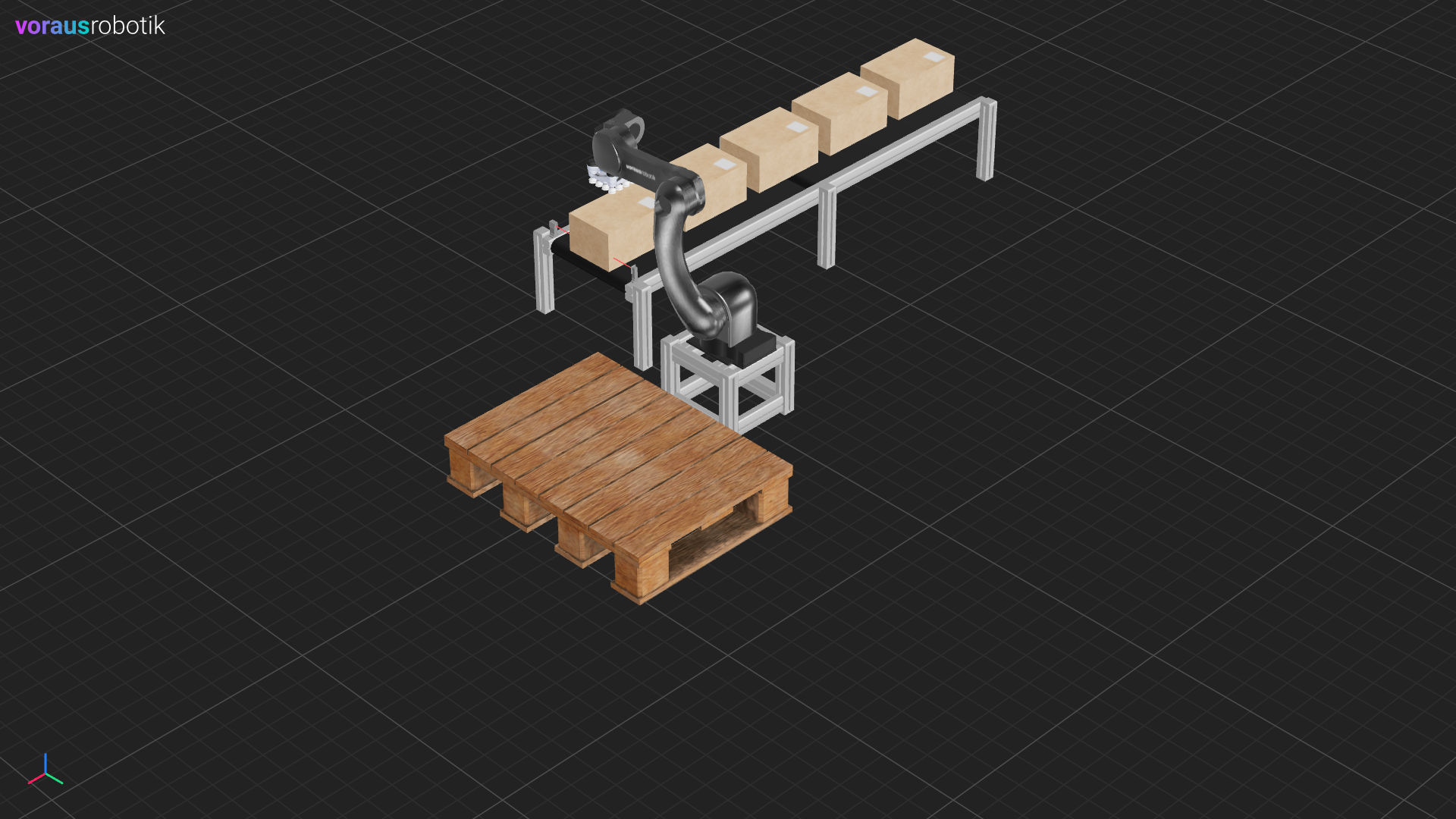
Fig. 23 The voraus simulation of a pick and place application
For the simulation, the voraus.core is operated in virtual mode in order to integrate the robot. The program that is tested here against the simulation can therefore also be used on a real system.