Scene Visualization
Based on Control Robot, the example pick_and_place/scene_visualization loads further 3D assets into the
visualization and modifies them.
Used components are:
As in the previous example the robot is loaded into the visualization with robot_visualization.py
and synchronized with the voraus.core via OPC UA.
python3.11 scene_visualization/robot_visualization.py
robot_visualization.py:
1"""Syncs the robot position with the voraus.core."""
2
3import os
4import time
5
6from asyncua.sync import Client
7from voraus_3d_visu import Visu
8
9VORAUS_CORE_URL = os.getenv("VORAUS_CORE_URL", default="http://voraus-core")
10ROBOT_MODEL_URL = f"{VORAUS_CORE_URL}/robots/VORAUS_INDUSTRIAL_ROBOT/VORAUS_INDUSTRIAL_ROBOT.glb"
11
12
13if __name__ == "__main__":
14 visu = Visu("http://voraus-3d-visu/")
15 client = Client("opc.tcp://voraus-core:48401/")
16
17 with visu.connection(), client:
18 robot = visu.add_model(model_url=ROBOT_MODEL_URL, position=[0, 0, 0])
19 joint_positions_node = client.get_node("ns=1;i=100111")
20
21 while True:
22 (joint_positions,) = client.read_values([joint_positions_node])
23
24 visu.update(
25 robot.child("CS0").rotation.z(joint_positions[0]),
26 robot.child("CS1").rotation.z(joint_positions[1]),
27 robot.child("CS2").rotation.z(joint_positions[2]),
28 robot.child("CS3").rotation.z(joint_positions[3]),
29 robot.child("CS4").rotation.z(joint_positions[4]),
30 robot.child("CS5").rotation.z(joint_positions[5]),
31 )
32
33 time.sleep(0.01)
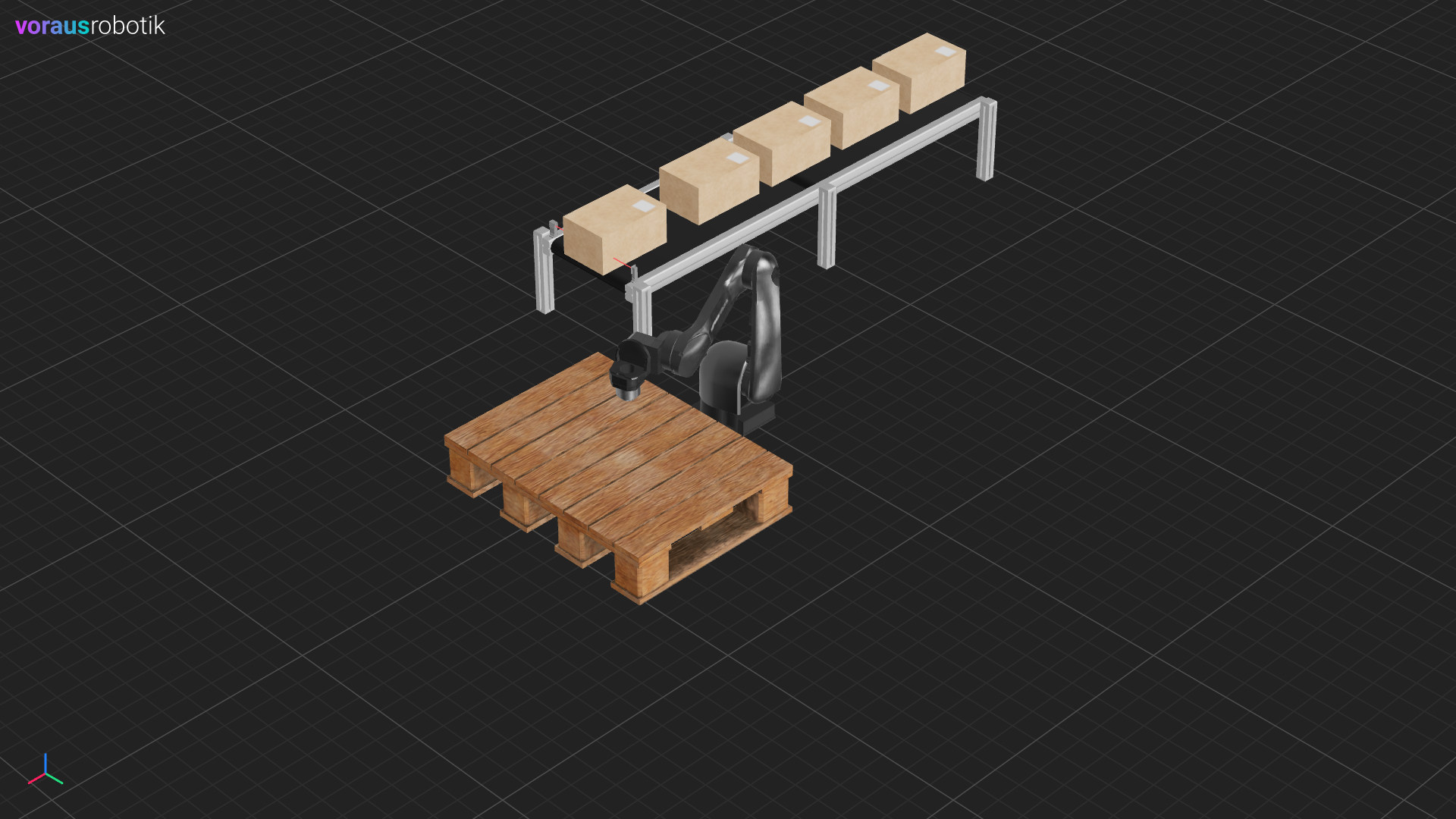
After we have loaded the robot model into the visualization via a model_URL, there are further local 3D assets located
in assets/, some of which are loaded into the scene by executing scene_visualization.py.
These include a pallet, a conveyor belt, 5 boxes and a light barrier as shown in Fig. 26.
python3.11 scene_visualization/scene_visualization.py
scene_visualization.py:
1"""Sync assets with the visualization."""
2
3from pathlib import Path
4
5from voraus_3d_visu import Visu
6
7ASSETS = Path(__file__).parent.parent / "assets"
8
9
10COLOR_RED = [0.8, 0.02, 0.05]
11COLOR_GREEN = [0.02, 0.8, 0.05]
12
13if __name__ == "__main__":
14 visu = Visu("http://voraus-3d-visu/", clear=True, identifier="scene")
15
16 visu.add_model(
17 model_path=ASSETS / "pallet/pallet.glb",
18 position=[0.65, 0.10, 0.11],
19 rotation=[0, 0, 0],
20 )
21
22 visu.add_model(
23 model_path=ASSETS / "conveyor/conveyor.glb",
24 position=[-0.95, -0.70, 0],
25 )
26
27 boxes = [
28 visu.add_model(
29 model_path=ASSETS / "box/box.glb",
30 position=[-1.8 + i * 0.4, -0.7, 0.43],
31 )
32 for i in range(5)
33 ]
34
35 light_barrier = visu.add_model(
36 model_path=ASSETS / "light_barrier/light_barrier.glb",
37 position=[0.01, -0.70, 0.35],
38 unique_material=True,
39 )
40
41 with visu.connection():
42 visu.update(
43 light_barrier.child("light_beam").material.color.rgb(*COLOR_GREEN),
44 )
45
46 input("Press <enter> to update the scene.")
47 visu.update(
48 boxes[4].position.x(-0.1),
49 light_barrier.child("light_beam").material.color.rgb(*COLOR_RED),
50 )
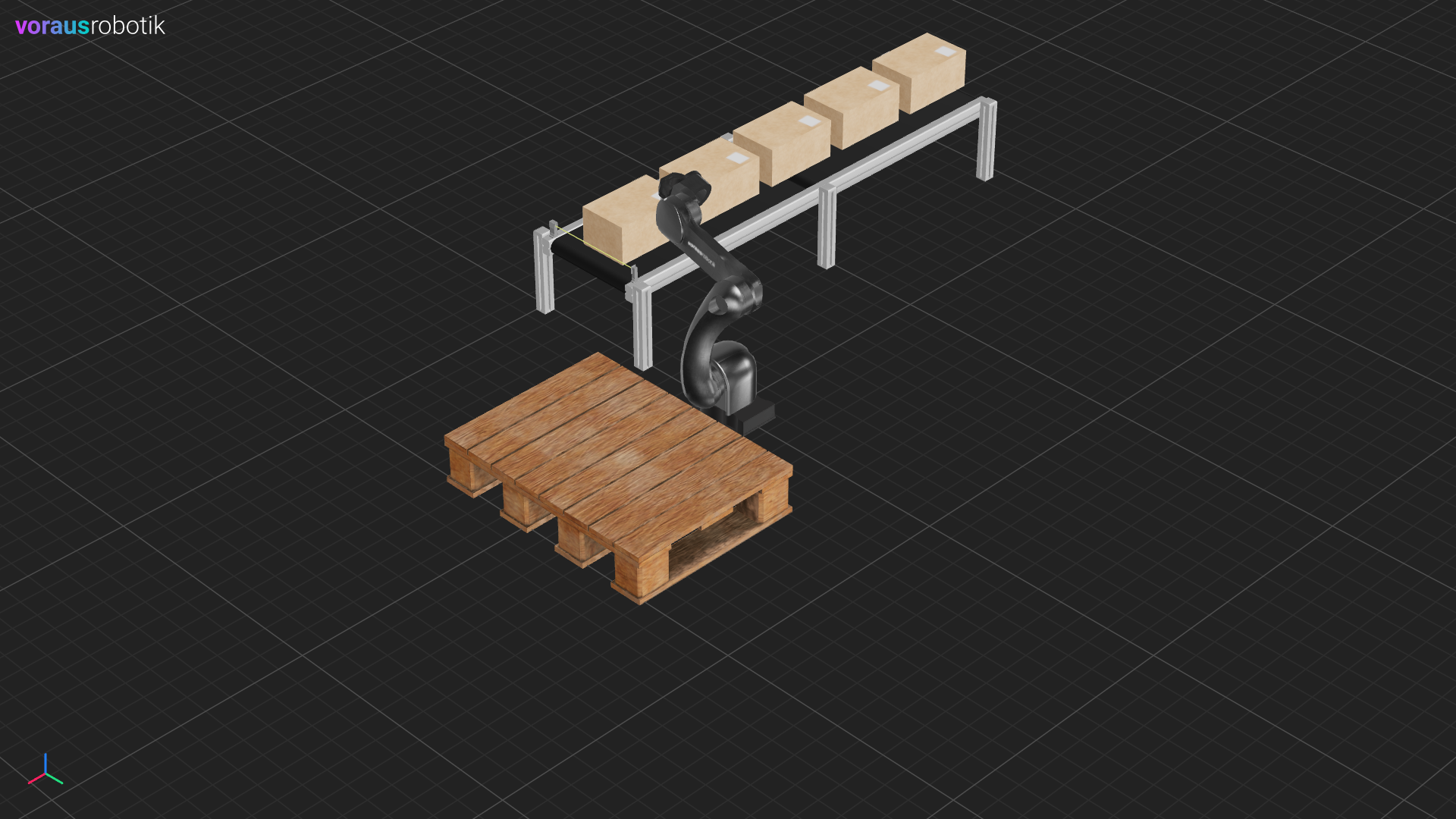
The script sets the color of the light barrier beam to green at the beginning and pauses. When the enter key is pressed, a box is moved, and the beam is coloured red (see Fig. 27).
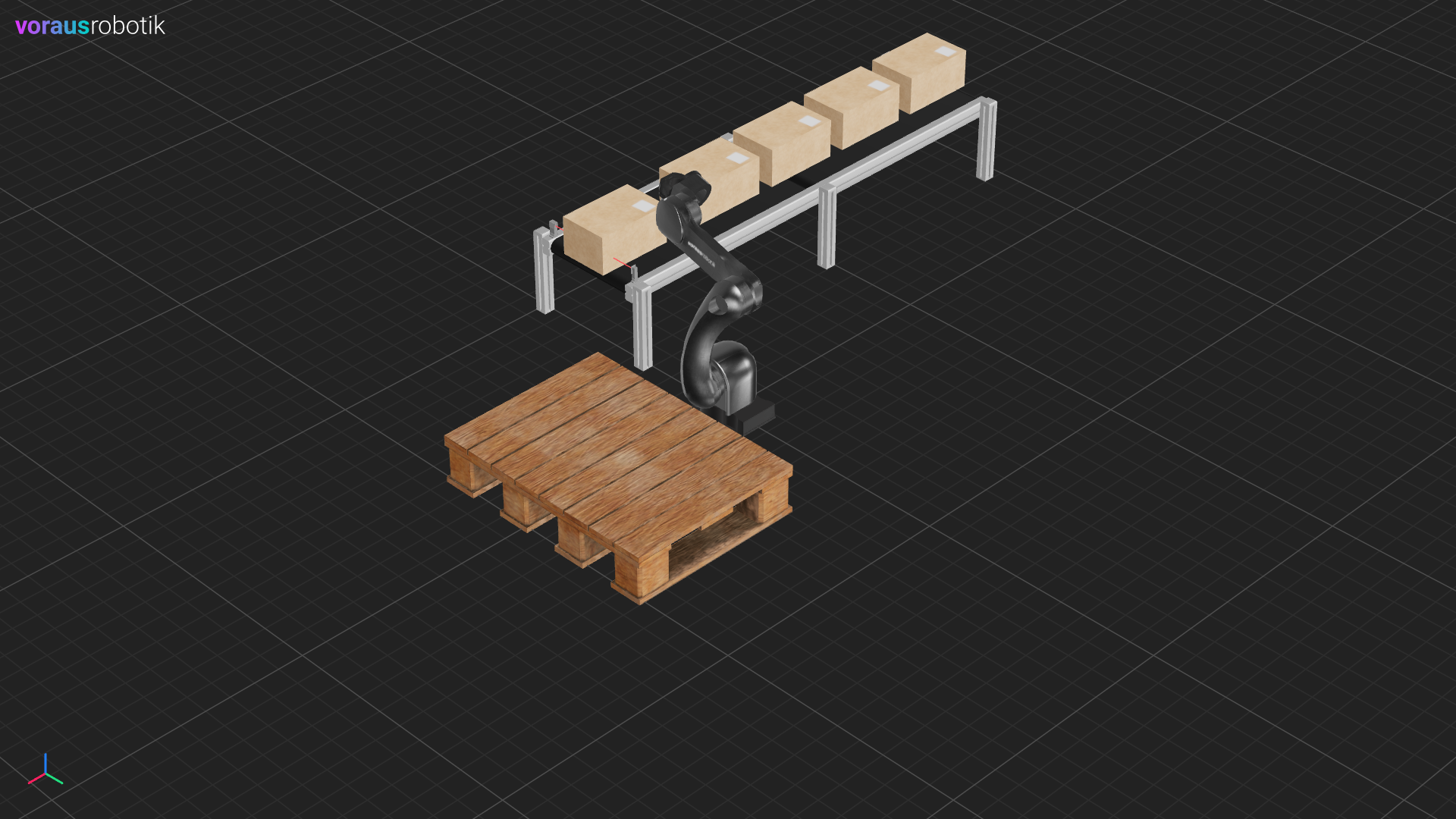
Fig. 27 Modified scene after changing the light barrier beam color and a pox position
By executing program.py the robot is moved and continues after waiting for a user input with pressing the
enter key.
python3.11 scene_visualization/program.py
program.py:
1"""Moves the robot."""
2
3from math import radians
4
5from voraus_robot_arm import CartesianPose, JointPose, VorausIndustrialRobotArm
6
7HOME = JointPose(0, -1.57, 1.57, -1.57, -1.57, 0)
8POSE1 = CartesianPose(0.5, 0, 0.2, -radians(180), 0, radians(35))
9
10if __name__ == "__main__":
11 robot = VorausIndustrialRobotArm()
12 with robot.connect("voraus-core", port=48401):
13 robot.activate()
14
15 robot.move_ptp(HOME)
16 robot.move_ptp_relative(JointPose(j1=-1.57, j2=-0.3)).result()
17
18 input("Press <enter> to move the robot again.")
19 robot.move_linear(POSE1).result()
Finally, the robot, the box and the light barrier color have changed as shown in Fig. 28.